当社はCookieを使用して、お客様が当社のWebサイトでより良い体験を得られるようにしています。引き続き閲覧する場合は、当社グループのプライバシーポリシー ![]() に同意したことになります。
に同意したことになります。
藤本 裕樹様(株式会社CyberQLead)(写真右側)
坂口 諒様(合同会社スタープリンス)(写真左側)


2024年度の未踏ターゲット事業では、災害支援ロボットにおいて重要となる「高自由度アームのモーションプランニング(動作計画)」という課題に対し、量子アニーリング・イジングマシンを用いた新しい解法の提案に取り組みました。
もともと宇宙開発に興味を持っており、宇宙と現在の社会のどちらにも役に立ちそうなテーマを検討していたところ、ロボットのモーションプランニングという課題にたどり着きました。現在の主流である6自由度の多関節ロボットアームは、特定の作業環境で動作するには十分なことも多いですが、災害現場のような障害物の多い環境下においては、より複雑な動作ができる多関節構造(連続体ロボット)が求められています。本プロジェクトでは、災害復旧現場を想定した6自由度よりも多い多関節の自立ロボットの開発に取り組みました。
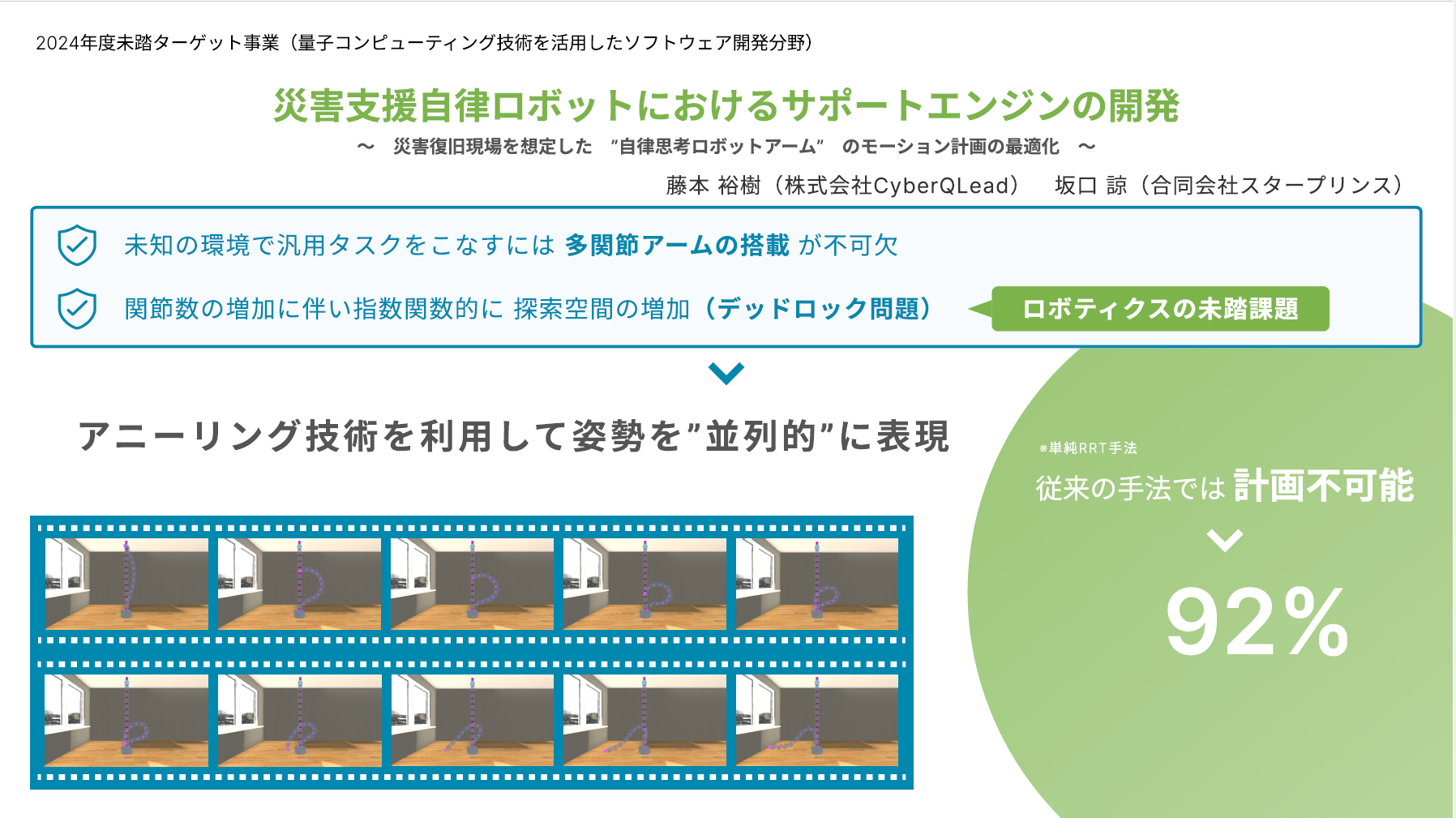
多関節ロボットアームが障害物を回避しつつ、目標点へスムーズに到達する経路を計画する問題です。ロボットアームの各関節はある時間軸における稼働角度を持っており、ロボットアームの先端(エンドエフェクタ)が目的地点に到達するまでの移動距離が少なく滑らかな各時間軸ごとの姿勢遷移を作成します。
関節 x 角度 × 時間軸の3次元の決定変数(配置する場合は1、配置しない場合は0)
決定変数のイメージ
| 時間軸 | |||||||
|---|---|---|---|---|---|---|---|
| 関節 | 角度 | 0 | 1 | 2 | 3 | 4 | ・・・ |
| 0 | 0 1 2 3 ・ ・ ・ 359 |
||||||
| 1 | 0 1 2 3 ・ ・ ・ 359 |
||||||
| ・ | |||||||
| ・ | |||||||
| ・ | |||||||
今回取り組んだテーマは自由度が非常に高い問題であり、問題規模が大きくなってしまうという課題がありました。例えば、関節の数を10とした場合、角度を1°刻みとすると選択肢は360個となり、1秒間隔で1分間の計画を作ろうと思うと、決定変数の数は10 * 360 * 60 = 216,000個となり求解は困難でした。そのため、まずは10°刻みで大雑把な計算を行い、その計算結果に基づいて不要な部分を減らした上で詳細な計画を作る、などといったアプローチも検討しましたが、依然として良い解を得るのが難しい状況でした。また、実際の現場での運用を考えると、毎回クラウドに問題を投げて計算を行う時間についても課題になると感じました。これらは、いわゆる「問題分割」と呼ばれる課題(一回の計算で解く問題規模や計算時間、得られる解の精度などのバランス)に該当すると思いますが、いいバランスを見つけるには多くの試行錯誤を要する難しい課題でした。9月の中間発表くらいまでは、思うような成果が出せずにとても悔しい思いをしました。
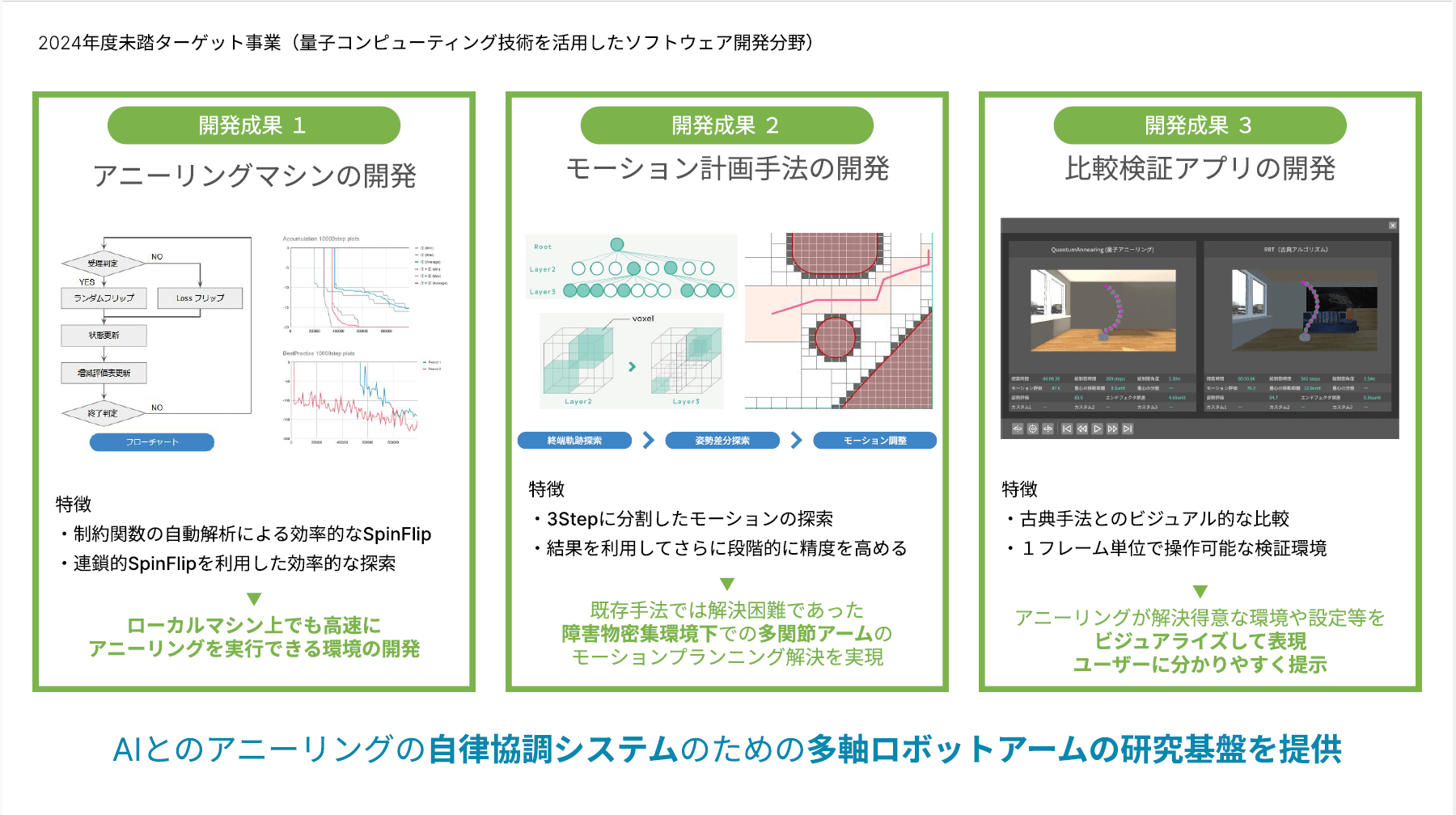
検討を重ねた結果、(1)終端軌跡探索(3次元の空間の分割)、(2)姿勢差分探索(分割した空間ごとに経路探索 → ここにイジングマシンを活用)、(3)モーション調整(後処理でより良い解があれば調整)、の3つのフェーズに分けて解を求める手法を開発しました。また、現場での運用を見据え、ローカルで最適化の計算ができるよう、過去に開発をしたことがあったイジングマシンをこの問題を解くために改良し活用することにしました。これらを含めた様々な試行錯誤や工夫を重ね、12月頃にはようやく目に見える成果を得ることができました。
従来の経路探索手法(単純RRT)では経路を見つけられなかった障害物の多い環境において、今回開発した手法は9割以上で経路の探索に成功しました。イジングマシンを活用することで、これまで困難だった経路計画が可能になり、とても達成感がありました。
今後は、アニーリングとAIの協調による自律最適化システムの開発を、ロボティクスの周辺分野から進めていくことに挑戦したいと思っています。具体的には、ロボットが汎用的に様々な最適化問題を自律的に解決する未来を見据えながら、最適化とRAG(外部の情報検索と生成AIを組み合わせて回答精度を向上させるための技術)をうまく組み合わせることができないか、などといったことを考えています。
Fixstars Amplifyは、複数の異なるイジングマシンを共通のAPIで扱えるという点で、オブジェクト指向で言うところの「ポリモーフィズム(多態性)」を実現しています。この統一されたインターフェースにより、ユーザーはバックエンドの違いを意識せずに目的や性能要件に応じて最適なマシンを切り替えることができます。
また、従来は、イジングモデルへの定式化とその制約構造の理解が求められ、最適化の敷居は非常に高いものでした。しかし、Fixstars Amplifyはその障壁を下げ、ユーザーが複数の定式化を気軽に試し、結果を比較・改善しながら学習していける環境を提供しています。この構造は、かつてTensorFlowやPyTorchがディープラーニングを民主化したのとよく似ています。モデル内部を深く知らずとも、多くの開発者が実用的なAIを構築できるようになったように、Fixstas Amplifyは量子・アニーリング最適化のプラットフォーム化を推進する存在です。専門知識がなくても無料で使い始められる敷居の低さも大きな魅力です。
最適化に求められるのは、「実装力」だけでなく「問題の設計力」です。どこまでを厳密に扱い、どこを緩め、どの粒度で最適化するかといった設計が、最終的なパフォーマンスや実装の現実性を大きく左右します。
最適化で解決できる課題は多く存在します。ぜひ、まずは軽い気持ちで触ってみることをおすすめします。
*本記事の掲載内容は全て取材時の情報に基づいています